
咨询热线
18888889999
18888889999
notice 网站公告
— 杏彩体育资讯 —
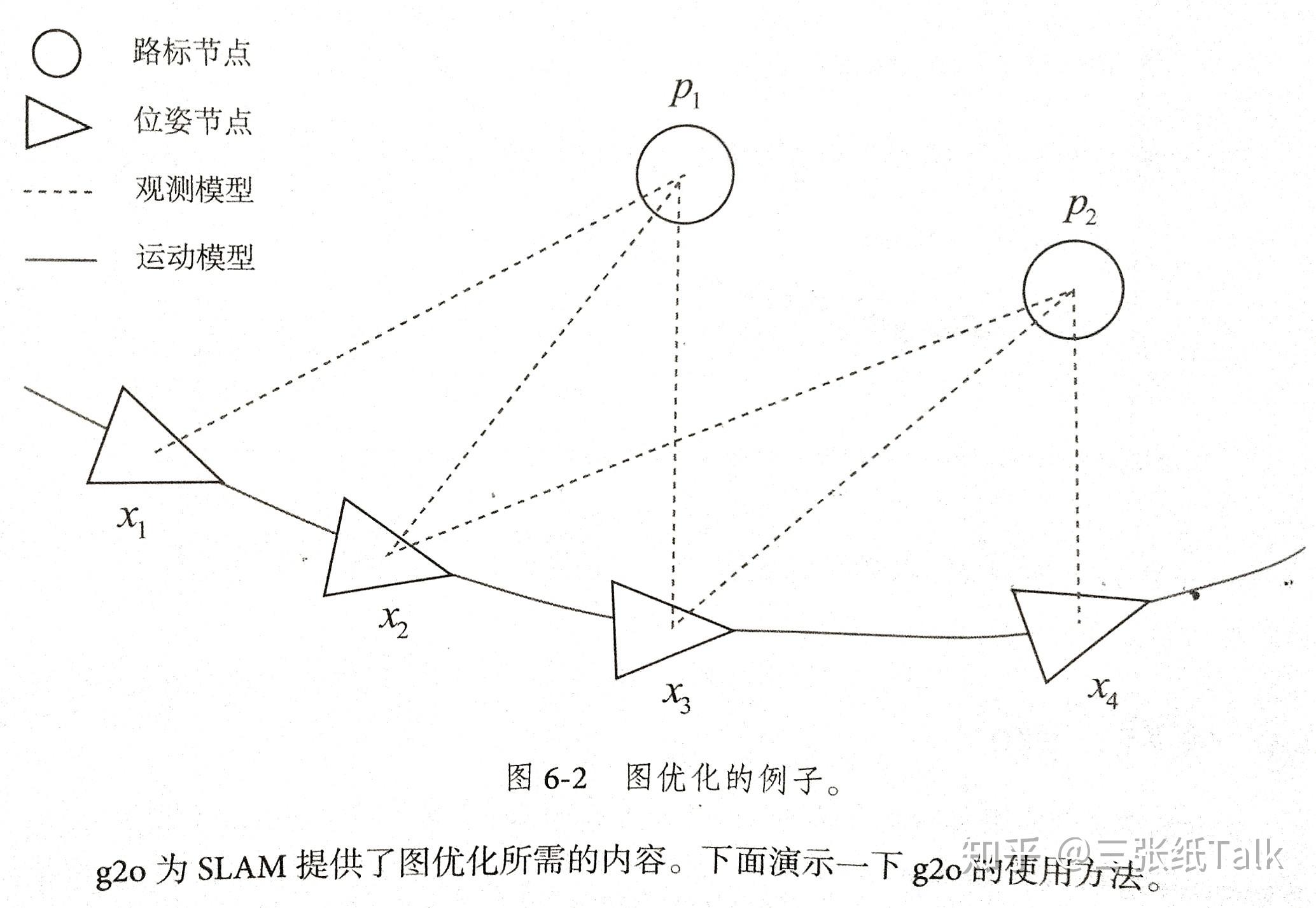
图优化,是把优化问题用图(Graph)描述:一个图由若干个顶点(Vertex),以及连接着这些顶点的边(Edge)组成。顶点表示优化变量,边表示误差项。
1)三角形表示相机位姿节点,即帧(Frame、KeyFrame)的相机位姿
2)圆形表示路标点:p1和p2,即地图点,3D点,构成了图优化的顶点
3)实线表示相机的运动模型:相机的运动轨迹
4)虚线表示观测模型:p1的观察帧是x1、x2、x3,虚线构成了图优化的边
从上述的简介可以看出:构成图优化需要边和顶点,顶点也是边的构成部分。下图是优化p1和p2等3D地图点。
Optimizer类中的5种优化模型都是基于下图演变而来。
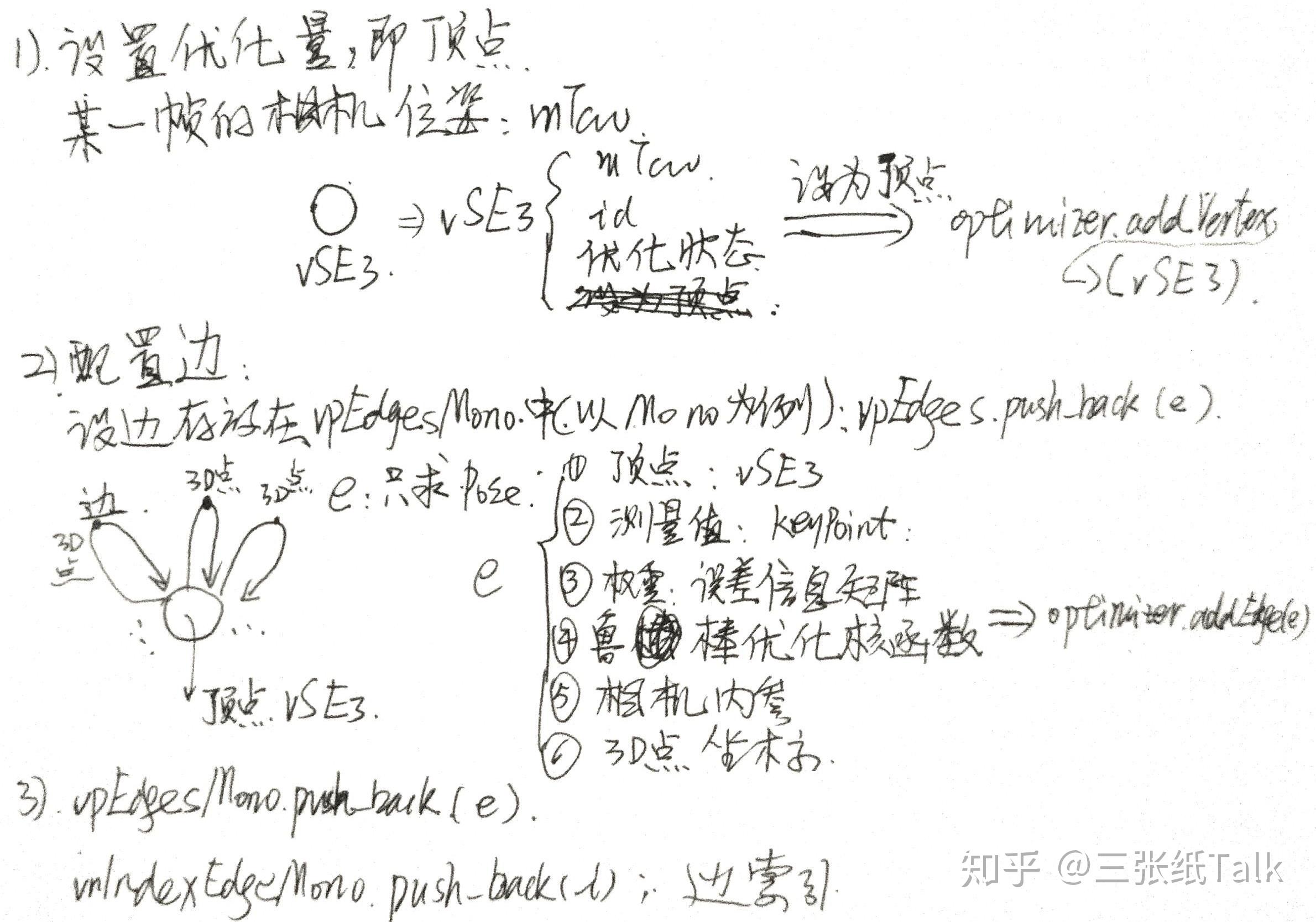
1.帧的相机位姿优化函数PoseOptimization
PoseOptimization优化的是单帧图像的位姿。相机在运动过程中,每帧图像都含2D特征点和与其对的3D地图点,通过3D-2D的投影关系估计出相机的位姿。
PoseOptimization是对某帧图像中的多个地图点建立多个一元连接边,构成图进行优化,优化某帧图像对应的相机的位姿。
2. 通过两帧之间匹配的MapPoints优化两帧间Sim3:OptimizeSim3
OptimizeSim3优化两帧的Sim3
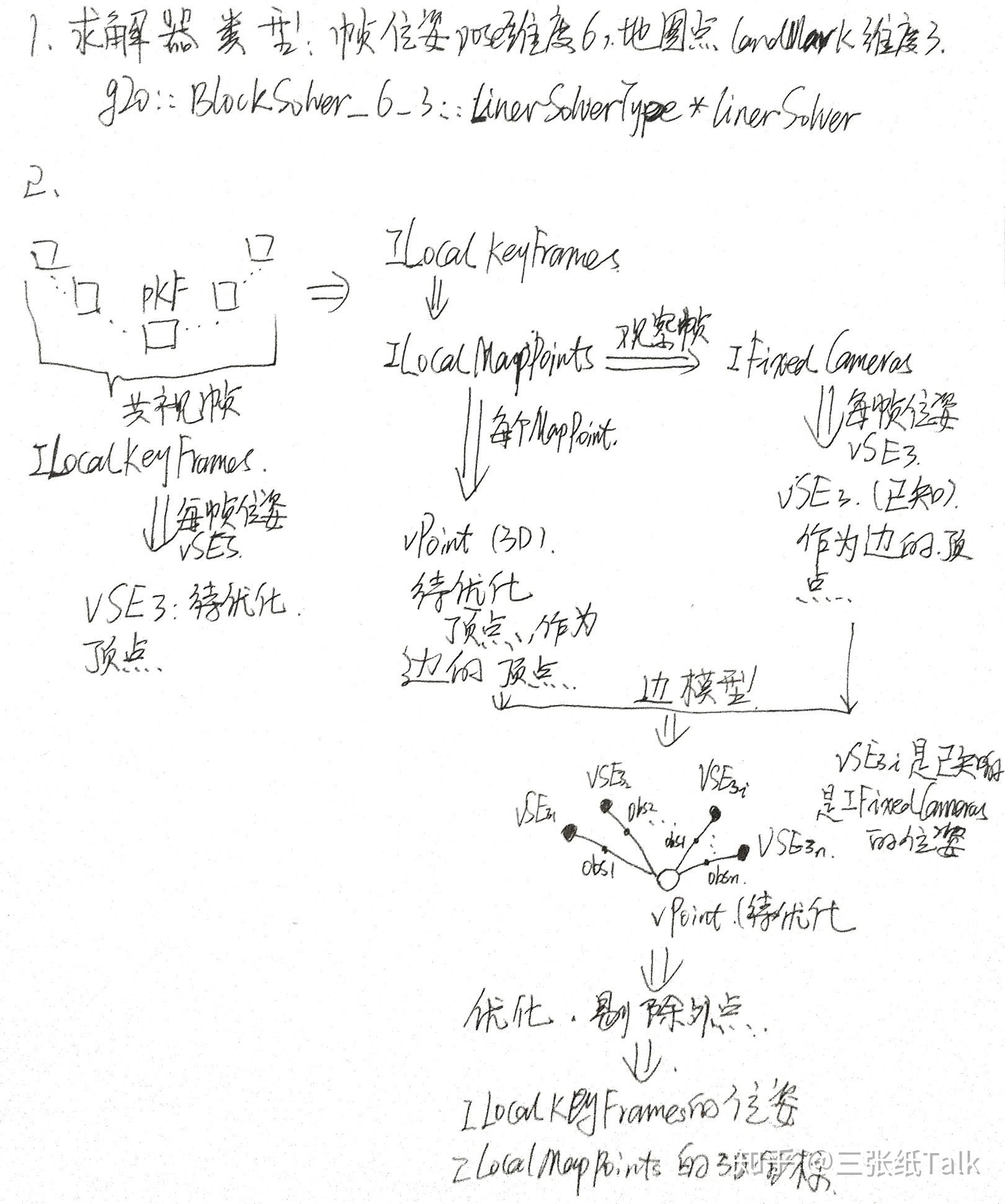
3.局部BA优化LocalBundleAdjustment
4.本质图优化OptimizeEssentialGraph
5.全局BA优化GlobalBundleAdjustment
PoseOptimization是针对某一帧图像的相机位姿的。该帧已知的条件有3D地图点坐标,2D特征点坐标和相机内参等,构建的图优化模型:相机位姿是待优化量作为图优化的顶点,3D地图点、相机内参、相机位姿(待优化)构成图优化的边。
模型很像14讲的“6.4.3 使用g2o拟合曲线”的示例中的图优化模型。
PoseOptimization函数的步骤:
4. 进行4次优化,每次迭代10次,剔除外点和误差过大的边
//初始值
vSE3->setEstimate(Converter::toSE3Quat(pFrame->mTcw));
optimizer.initializeOptimization(0);//对level为0的边进行优化
optimizer.optimize(its[it]);其实在optimizer.optimize(its[it]);中调用了函数:
//来自types_six_dof_expmap.h的计算误差函数
void computeError(){
const VertexSE3Expmap* v1=static_cast<const VertexSE3Expmap*>(_vertices[0]);
Vector2d obs(_measurement);
_error=obs - cam_project(v1->estimate().map(Xw));
}计算卡方:在base_edge.h中,使用卡方校验剔除外点
virtual double chi2() const
{
return _error.dot(information()*_error);
}for (size_t i=0, iend=vpEdgesMono.size(); i < iend; i++)//单目 每条边
{
g2o::EdgeSE3ProjectXYZOnlyPose* e=vpEdgesMono[i];
const size_t idx=vnIndexEdgeMono[i];
if (pFrame->mvbOutlier[idx])//外点
{
e->computeError();
}
const float chi2=e->chi2();
if (chi2 > chi2Mono[it])
{
pFrame->mvbOutlier[idx]=true;//是外点 不好的点
e->setLevel(1);// 设置为outlier
nBad++;
}
else
{
pFrame->mvbOutlier[idx]=false;//原来是外点 优化过后 误差变小 变成内点了
e->setLevel(0);// 设置为inlier
}
if (it==2)
e->setRobustKernel(0);// 除了前两次优化需要RobustKernel以外, 其余的优化都不需要
}5. 更新优化后的Frame的相机位姿
ORB-SLAM当中在LoopClosing::ComputetSim3()中调用了OptimizeSim3函数。
单目相机具有尺度不确定性,相机运动一段时间后可能会产生尺度漂移和误差,通过计算两帧图像的Sim3变换,获取尺度变换。并通过Sim3匹配两帧图像,获取更多匹配的MapPoints,因为产生了新的匹配的MapPoints,在使用这些MapPoints对Sim3进行优化,获取精度更高的Sim3。
Sim3Solver类的讲解见下面的链接:
三张纸Talk:[ORBSLAM2_14]之Sim3Solver边主要由3D点(已知)、2D点(已知)、待求值g2oS12组成。
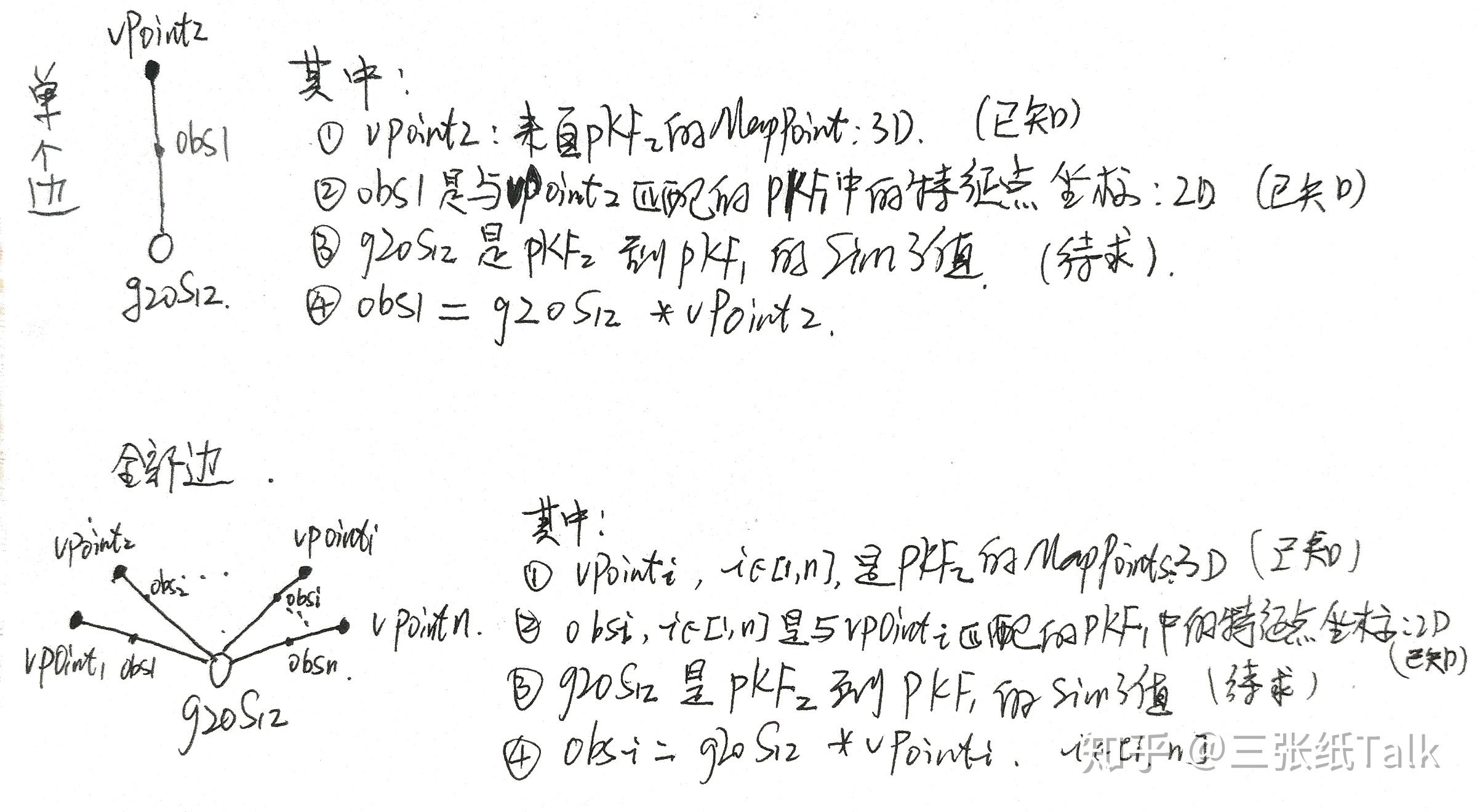
1)构造并初始化优化器:g2o::SparseOptimizer optimizer
2)将两帧之间的Sim3(待求量)设置为顶点:optimizer.addVertex(vSim3);
3)将两针之间匹配上的地图点(世界坐标系)分别转为在各自相机坐标系下的坐标(3D)设置为顶点(已知):optimizer.addVertex(vPoint1);和optimizer.addVertex(vPoint2);
4)分别设置两帧对应的地图点(相机坐标系下的坐标)vPoint1和vPoint2的重投影误差(封装在SparseOptimizer::computeActiveErrors())为边
5)进行优化:optimizer.optimize(5);
6)剔除重投影误差过大的边:卡方校验if (e12->chi2() > th2 || e21->chi2() > th2)
7)再进行一次优化,剔除外点
8)更新优化后的sim3:g2oS12
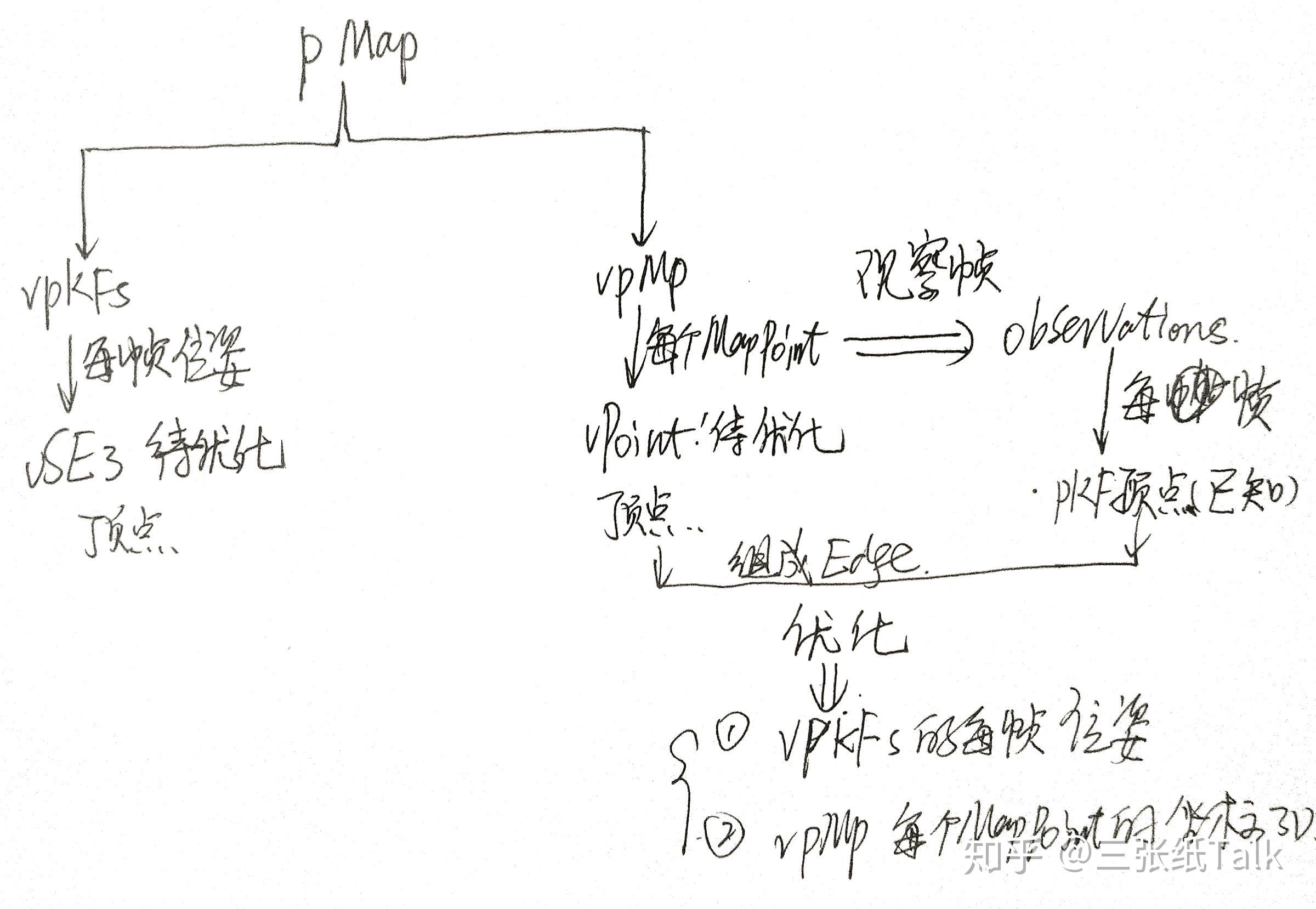
局部BA优化,优化的是局部关键帧的位姿(待优化)和这些局部关键帧可以观测到的地图点的3D坐标(待优化)。局部关键帧是当前关键帧的共视帧集合,局部地图点是局部关键帧的所有地图点集合。将局部地图点与可以观测到他们的关键帧放在一起进行优化,将可以观察到局部地图点的关键帧的SE3位姿和局部地图点的3D坐标(待优化量)添加到顶点中,并作为边的顶点进行优化。
void Optimizer::OptimizeEssentialGraph(Map* pMap, KeyFrame* pLoopKF, KeyFrame* pCurKF, const LoopClosing::KeyFrameAndPose& NonCorrectedSim3, const LoopClosing::KeyFrameAndPose& CorrectedSim3, const map<KeyFrame*, set<KeyFrame*> >& LoopConnections, const bool& bFixScale)
优化pMap中的每一个关键帧pKF的位姿和每一个地图点的坐标。
本质图EssentialGraph包含了四部分:LoopConnections、父关键帧(Spanning tree edge)、pKF->GetLoopEdges()、pKF->GetCovisiblesByWeight(minFeat)放在一起进行优化,优化的目标是关键帧pKF的sim3位姿和地图点的坐标。 将优化后的sim3位姿转换为SE3,就得到了相机的位姿,并对地图点的坐标进行投影得到更新后的坐标。
Sim3Solver类的讲解见下面的链接:
三张纸Talk:[ORBSLAM2_14]之Sim3Solver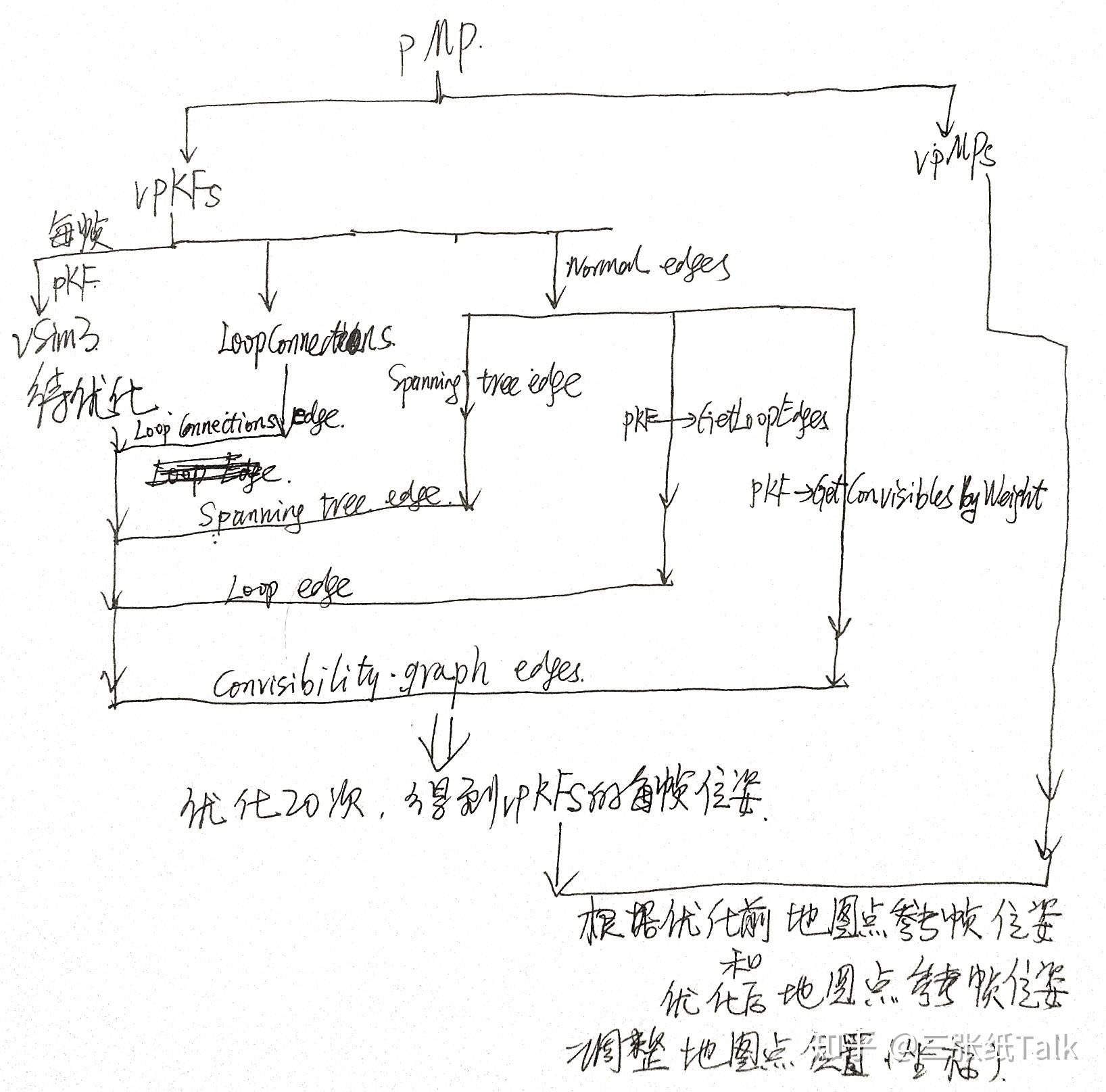
整个地图中所有关键帧和所有地图点都优化,将全局地图当中所有的关键帧和地图点都放进来一起进行优化。对关键帧的位姿和地图点3D坐标进行优化。
如有需求请您联系我们!
地址:海南省海口市58号
电话:18888889999
手机:海南省海口市58号
Copyright © 2012-2018 首页-杏彩体育中国官方网站 版权所有 ICP备案编:琼ICP备88889999号




